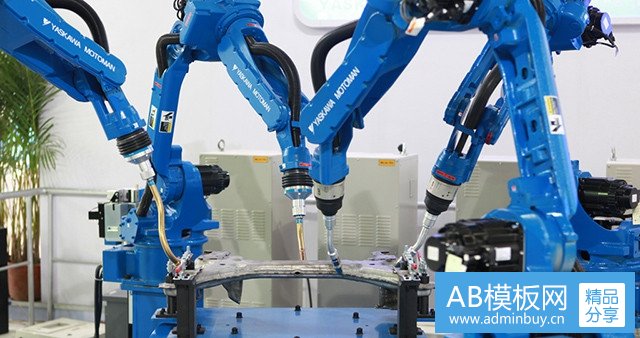
焊接机器人重要包含机器人跟焊接设备两局部。机器人由机器人本体跟把持柜组成。而焊接设备,以弧焊及点焊为例,则由焊接电源、送丝机弧焊、焊枪钳等局部组成。那么焊接机器人在实际利用中有哪些利用实例呢?大家追随小编一起来理解一下吧。
焊接机器人的利用实例
变压器油箱上存在多种焊接接头型式,有对接焊缝、平角焊缝、破角焊缝等。下面,咱们就以焊接难度较大的破角焊为例,介绍一则焊接机器人在变压器制造中的利用实例。
为保障焊接强度,油箱在焊接破角焊缝时须要采取由下向上破焊的方法。此方法熔深较大,轻易焊透,但熔池底部是个斜面,熔融金属在重力作用下比较轻易下淌。因此,必须采取比平焊稍小的电流,焊枪的摆动频率应稍快,采取锯齿形节距较小的摆动方法进行焊接,使熔池小而薄,熔滴过渡采取短路过渡情势。
焊接机器人破角焊,首先要对预设位置点、焊接起始点、旁边点、焊接终止点进行示教并创建程序,必须加入摆焊功能跟跟踪功能。假如示教器中已保存有破角焊程序,仅需对焊接开端、结束点进行示教即可,操作步骤就可大大简化。
在焊接机器人体系中,可能依据不同的材质、板厚、接头情势及焊接位置等情况,设定不同的焊接参数。工业机器人用于制造生产的机器人系统。工业机器人的定义是自动化的、可编程的,有三个及以上运动轴的自动化装置。三维切割机器人柔性高,尤其适合小批量的,对材料的适应性强,激光切割机通过数控程序基本上可以切割任意板材。
利用上述程序跟参数,对变压器油箱箱沿与箱壁连接处进行破角焊,就会形成一道鱼鳞纹均匀、焊缝宽窄一致、不跑偏且不接头的美观焊缝,手工焊接是很难达到这种后果的。焊接机器人从事焊接的工业机器人。根据国际标准化组织工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。
值得留神的是,在焊接机器人示教进程中,调剂好焊枪的倾斜角度很要害,假如角度偏差较大,就会呈现焊脚错误称的情况。同时,还要保障焊丝伸出长度足够,否则焊接飞溅会堵塞枪嘴并造成维护罩过热。
焊接机器人在推广进程中须要改进的问题
实际利用证明,对不受空间限度的变压器长直焊缝或带法兰的圆形角焊缝,机器人焊接比人工焊接存在宏大上风。但焊接机器人在变压器制造行业的利用尚处于初级阶段,为了进步焊接机器人利用率,还要从两个方面进行改进。
(1)焊接机器人制造企业要进步其便捷化、智能化水平,以便能与生产现场更加有效的对接。如:利用无线定位技巧,用激光笔模仿示教点及焊枪角度,取代示教机会械臂活动;增加机器人手臂作业半径,开发实用工装,使机器人能挪动到翻箱放倒的变压器油箱内,从而实现变压器内部焊缝焊接。
(2)变压器设计部分要进步产品及零部件标准化水平,公道布局焊缝位置,减少整机扣压、超出焊缝景象,给焊接机器人连续焊接发明良好前提。
今天对于焊接机器人的利用实例介绍就讲到了,假如你对小编的讲解有什么不同的见解或者倡导,随时欢送你来接洽小编,让小编好做矫正,让咱们独特窗习,独特进步。