广东省浩康智能装备有限公司
客服热线:400-7889-685
13829088958
13927084620


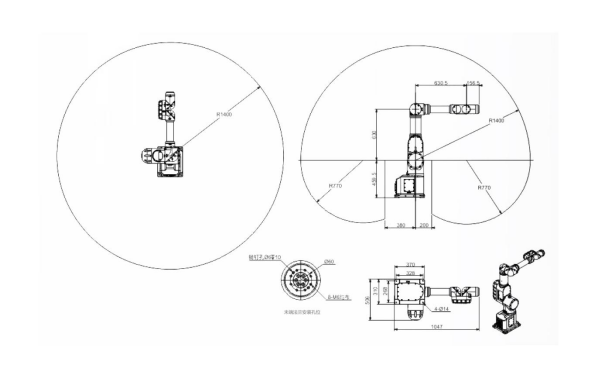
RRTIRSE1506A采用伺服电机配谐波减速机结构,体积小、工作范围大、速度快、精度高,可与转台、滑台输送链系统等辅助设备集成作业。整机采用全密封,防水防尘,适用环境恶劣的油污、粉尘行业。控制系统掌上型对话式操作器简单易学,非常适合生产使用。柔性大,可实现外表面和内表面的喷涂。
产品型号 | 项目 | 手臂 | 手腕 | ||||
J1 | J2 | J3 | J4 | J5 | J6 | ||
RRTIRSE1506A | 臂展 | 地面-2轴距459.5mm | 2-3轴距630mm | 3-5轴距 630.5mm | 5轴-端面距156.5mm | ||
范围 | ±180° | ±90° | -70°/+255° | ±180° | ±115° | ±360° | |
速度 | 130°/s | 130°/s | 210°/s | 240°/s | 270°/s | 330°/s | |
轴数 | 6轴 | 重复定位精度 | ±0.08mm | ||||
臂展 | 1400mm | 电源容量 | 3.3KVA | ||||
负载 | 5kg | 本体重量 | 约120KG | ||||
设计目标:此专机设计实现了机器人自动化连线,解决人工作业造成的操作繁琐,效率低,劳动强度大等问题。实现了连续、效率高、高质量的自动化功能。
由人工将需喷涂产品吊入工作台上的吊架上,然后吊架慢慢转动,将产品转到工作位置后,产品自转,机器人开始喷涂。